
 Remapping real drone into simulators
Remapping real drone into simulatorsYou May Also Enjoy

Gazebo-ROS Validation Tests
How to create validation tests with simulator before developer merges changes.

Creating applications with ROS
How to set up the ROS Action Server for various demo applications.

Linux and ROS Background
An overview of skills to become a better drone developer.
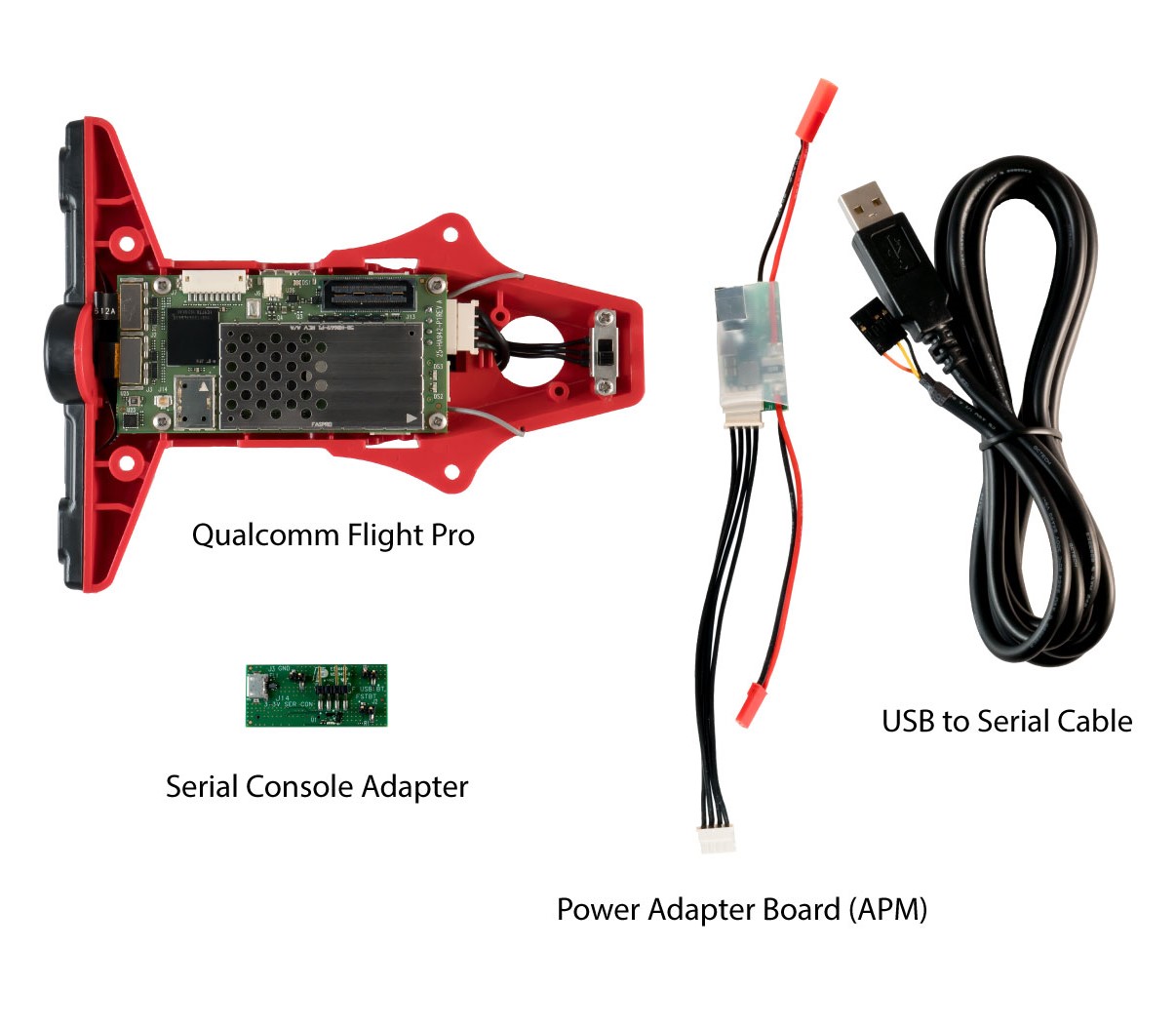
Flying the Snapdragon Flight Pro
Information about this drone and its framework.